Zenmuse L3 (DJI Care Enterprise Plus)






商品番号:SSN-000014
Zenmuse L3は、DJIの次世代高精度空撮LiDARシステムを搭載したDJI Matrice 400搭載用の新型LiDARモジュールです。1535nm長距離LiDAR、デュアル1億画素RGBマッピングカメラ、高精度POSシステム、そして3軸ジンバルをコンパクトな筐体に統合し、そのサイズからは想像できないほどの卓越した性能を発揮します。
本商品には機体保証「DJI Care Enterprise(Plusプラン)」が付属しています。
参考価格:2,964,500円(税込)送料無料
同梱物一覧
本商品には、以下のアイテムが同梱されます。
- Zenmuse L3×1
- Zenmuse L3 シングルジンバルコネクター×1
- 収納ケース×1
- ジンバルダンパー×1
- CFexpress Type B メモリーカード×2
- CFrxpress Type B カードリーダー×1
- DJI Matrice 400 キャリングケースインサート(Zenmuse L3)×1
- レンズクリーニングクロス×1
- ネジ&工具×1
Zenmuse L3の主な特長&機能
1535nm 長距離LiDAR

長距離測定、広範囲をカバー
Zenmuse L3は、周囲光100klux、反射率10%の対象物という条件下で、パルスレート100kHz時に最大950mの検出距離を実現します。可変パルスレートにより、出力を柔軟に調整でき、さまざまな運用シナリオに最適に対応します。通常の飛行高度300〜500mでは、1回の飛行あたりのカバー率範囲が大幅に拡大し、マッピング効率が向上します。
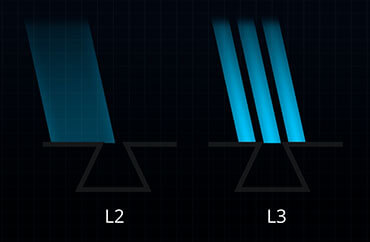
小スポット径、高エネルギー
ビーム発散角はわずか0.25mrad(1/e²)で、同距離におけるスポット径はZenmuse L2の約5分の1。これにより、電線や枝などの小さな物体も検出可能になります。エネルギー密度の向上により、透過性能が強化され、植生下の地表点密度が大幅に増加。これにより、複雑な地形や構造物を高精度に再構築することが可能になります。

高レートパルス、マルチリターン
最大毎秒200万パルスのレーザーパルス照射周波数と、最大16リターンへの対応により、Zenmuse L3は極めて高精度な空間再構築を実現します。点群密度と透過性能は調整可能で、高精度マッピングから複雑な環境まで、ニーズに応じた最適な設定が行えます。
デュアルカメラ1億画素 RGBマッピングシステム

デュアルカメラ1億画素
RGBマッピングシステム
デュアル1億画素 4/3型CMOS RGBセンサーとメカニカルシャッターを搭載したZenmuse L3は、精度と効率を大幅に向上させます。ピクセルビニング技術により、より大きな画素サイズで有効25MP解像度を実現し、光量の少ない環境でも優れた色再現性を提供します。

107°超広角FOV
デュアルRGBマッピングカメラは最大107°の水平視野角(FOV)を備えており、1回のシャッターでより広い範囲をカバーできます。LiDARのサイドオーバーラップ比率が20%でも、1回の飛行でデジタル正射写真図(DOM)とデジタル標高モデル(DEM)の両方のデータを取得でき、作業効率を大幅に向上させます。
精度と効率を両立
独自開発の高精度システム
アップグレードされた高精度POSシステムは、方位精度0.02°、ピッチ精度0.01°(ポストプロセス済み、1σ)を実現します。自社開発のLiDARは、150mで5mmの測距再現性(1σ)を実現し、マイクロ秒単位の時間同期に対応しています。各ユニットは厳格な工場キャリブレーションを受けており、常に信頼性の高い測量結果を提供します。

LiDARデータ精度
垂直精度は、飛行高度120mで3cm未満、300mで5cm 未満を実現しており、1:500、1:1000、1:2000 スケールのマッピングプロジェクトにも容易に対応できます。Zenmuse L3が生成する点群の厚みは Zenmuse L2のわずか半分であり、高度な解析や高精度アプリケーションに対応します。
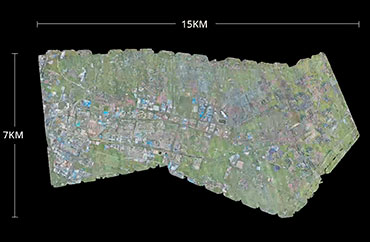
1日あたり最大100km²
DJI Matrice 400に搭載すると、Zenmuse L3 は卓越した作業効率を発揮します。飛行高度300mで、1回の飛行で最大10km²をカバー率でき、1日あたり最大100km²の測量が可能です。
データ取得

点群結果プレビュー
DJI Pilot 2は、ユーザーが定義したルートに基づいて自動的に飛行パラメータを推奨し、離陸前に飛行ストリップの密度プロファイルチャートや点群分布チャートを生成することで、ユーザーが点群結果をプレビューできるようにします。

送電線フォロー
Zenmuse L3は送電線フォロー機能を大幅に強化し、最大130mの高度での運用に対応します。障害物を回避したり送電線を横切ったりすることなく、Zenmuse L3はほとんどのシナリオで、1回の直線飛行で電力回廊のデータを完全に取得できます。
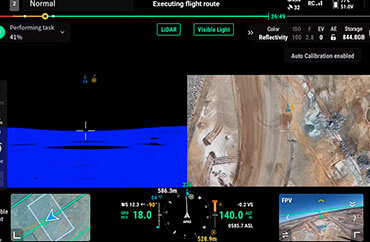
柔軟なスプリットスクリーン表示
DJI Pilot 2は、点群、RGB、またはVision Assistの任意の2つのデータソースを分割画面で表示でき、ユーザーはニーズに応じて自由に組み合わせて表示できます。送電線フォロー中やRGBカメラが下向きのときでも、Vision Assistはリアルタイムの前方映像を提供し、飛行リスクを低減するとともに、作業効率と安全性を向上させます。
リアルタイム点群
操作中にリアルタイムで点群SLAM再構築に対応し、2Dおよび3Dの点群を即時プレビューできるため、データ取得中に進捗を確認したり測定を行ったりできます。点群結果は DJI FlightHub 2 を通じてクラウドに即時同期でき、緊急時の迅速な対応や評価が可能です。

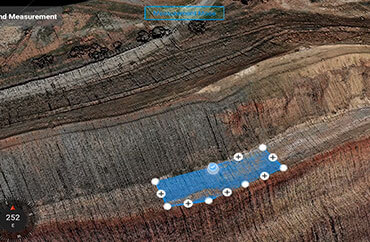
クラウドベースの点群測量
Zenmuse L3の点群出力はDJI FlightHub 2と完全に互換性があります。ユーザーは点群データをリアルタイムで閲覧・管理でき、詳細な飛行ルートの作成、注目ポイントの注釈や共有、高度な線や面の測定をクラウド上で直接行うことができます。
データ処理

PPKデータ処理
DJI Terraは強力な内蔵 PPK(ポストプロセス型キネマティック)機能を備え、D-RTK 3や標準ベースステーションデータに対応しています。本プラットフォームはRGB画像および LiDARのローカルPPKに対応し、ネットワーク接続が制限されている地域やRTKが利用できない場合でも、センチメートル単位の測位精度を提供します。

LiDAR ガウススプラッティング
DJI Terraは、Zenmuse L3で取得した点群データとRGBデータをガウススプラッティング融合により高度に再構築し、3Dモデルのリアリティとディテールを大幅に向上させます。この機能により、LiDARの適用範囲がさまざまなマッピングシナリオに広がり、より高品質な3Dモデル出力が可能になります。
融合型モデリング
DJI Terraは LiDARデータとRGBデータの高度な統合を可能にします。1回のデータ取得で、ユーザーは高精度点群、2Dマップ、3Dメッシュモデルを同時に生成できます。このデータ融合アプローチにより、特に橋梁や変電所など構造が複雑な環境において、モデルの完全性とディテールが大幅に向上します。電力エネルギー、交通、インフラを含む産業のニーズに応えます。
データ活用
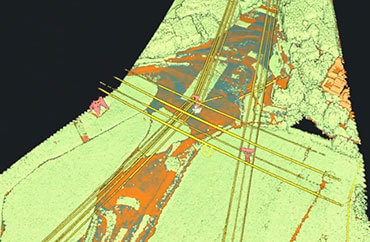
スマートフィルターDJI Modifyは点群のインテリジェントなセマンティック分類をサポートし、地表、植生、建物、電線、電塔などを自動で識別します。分類後、ユーザーはクイック選択や構造選択ツールを使用してカテゴリを効率的に調整でき、分類精度と処理効率をさらに向上させます。
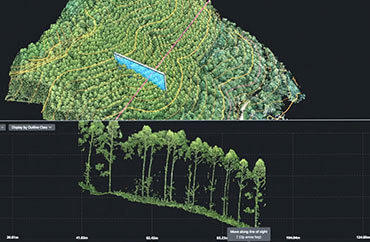
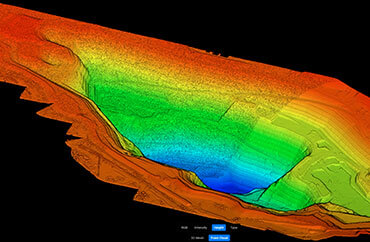
プロフィールツール
DJI Modifyのプロファイルツールを使うと、ユーザーは点群モデルの断面領域を柔軟に選択でき、地形変化や構造特徴、標高プロファイルを直感的に分析できます。
多彩な出力機能
DJI Modifyと組み合わせることで、Zenmuse L3は多用途な出力を実現します。DJI Modifyは点群データからセマンティック点群、DEM、TIN、点グリッド、等高線など、幅広いマッピング成果物を自動生成し、マルチレイヤー表示にも対応します。これらの出力は、エンジニアリングや設計の CAD 関連ワークフローの多様なニーズに対応します。
主な利用シーン

地形測量

採掘事業

地質災害調査

測量設計

森林管理

電気事業

鉱山調査

緊急調査
Zenmuse L3の主なスペック
システム仕様
| 製品名 | Zenmuse L3 |
| 点群データのシステム精度 | 高度120m飛行時: 垂直精度:3 cm(RMSE) 水平精度:4 cm(RMSE) 高度300m飛行時: 垂直精度 5 cm(RMSE) 水平精度:7.5 cm(RMSE) DJIのラボ環境にて、以下の条件下で測定: 1. 試験フィールドには、明確な角のある物体が含まれていました。DJI Matrice 400は、位置補正済みのD-RTK 3多機能ステーションに接続されました。飛行ルートは、DJI Pilot 2の「エリアルート」(IMUキャリブレーション有効)を使用し、直線スキャンで計画されました。飛行速度は15 m/s、ジンバルのピッチ角は-90°に設定され、飛行ルートの各直線区間は3300 m未満でした。 2. 拡散反射モデルに準拠した、露出した硬い地面のチェックポイントを使用。 3. 点群精度 最適化を有効にして、DJI Terraは後処理に使用されました。 |
| 点群の厚さ | 厚さ:1.2cm@1σ(120m鉛直飛行高度) 厚さ:2cm@1σ(300m鉛直飛行高度) 直線スキャンモードで測定。反射率80%の対象物上のチェックポイントを使用し、DJI Terra において点群最適化およびダウンサンプリングは無効の状態。6σを求める場合は、記載の厚さに6を乗じてください。 |
| 複合水平FOV(デュアルRGBマッピングカメラ) | 107° 光軸角が45°離れた2台のカメラの画像を合成して構成されています。 |
| RGB地上画素寸法(GSD) | 平均値:3 cm(高度300 mでの真下撮影飛行時) 詳細な計算方法については、公式DJI Zenmuse L3のウェブページのダウンロードページで入手可能なユーザーマニュアルを参照してください。 |
| 重量 | 1.60 kg(シングルジンバルコネクターを含まず) Zenmuse L3 のシングルジンバルコネクターの重量は145 gです。 |
| サイズ | 192×162×202 mm(長さ×幅×高さ) 非直交式ジンバル設計において、起動後のデフォルト安定状態で測定。 |
| 電力 | 64 W(標準) 100 W(最大) |
| 対応機体 | DJI Matrice 400(Zenmuse L3 シングルジンバルコネクターが必要) |
| 保護等級 | IP54 |
| 動作温度 | -20℃~50℃ |
| 保管環境温度 | -40℃~70℃ |
LiDAR
| レーザー波長 | 1535 nm |
| レーザービーム発散角 | 0.25 mrad(1/e²) |
| レーザースポットサイズ | Φ 41 mm@120 m(1/e²) Φ 86 mm@300 m(1/e²) |
| 検知範囲 | 700 m @反射率10%、350 kHz 950 m@反射率10%、100kHz 2000 m@反射率80%、100 kHz 1. 範囲の定義:範囲とは、発射されたレーザーパルスの50%が検出される距離として定義されます。レーザービームが複数の対象に当たる場合、レーザー送信機の総出力が分散され、到達可能距離が短くなります。 2. 試験条件:周囲光100 klx、視野中心部において、レーザービームの直径より大きい平面の対象物を使用、入射角は垂直、かつ大気視程23 kmの場合。 3. 最大検知範囲はデフォルトで900 mです。より長い検知範囲が必要な場合は、DJIサポートまたは正規販売店にお問い合わせください。 |
| ワイヤー検知範囲 | 21.6mm スチールコアのアルミ撚線ワイヤー: 300 m@100 klx、350 kHz 18.4mm 黒色PVC絶縁電線: 100 m@100 klx、350 kHz 1. 範囲の定義:マッピングにおいて、完全にスキャンされたワイヤーの区間が1メートルあたり4点の点密度に達する距離。 2. 試験条件:周囲照度100 klx、大気視程23 km、LiDAR中心FOVがワイヤーに垂直、繰り返しなしスキャンモード、ドローンがワイヤーに沿って15 m/sで飛行、ワイヤーは清浄で劣化なし。 |
| 測距精度 | 絶対精度:±10 mm 再現性:< 5 mm(1σ) 上記仕様は、周囲温度25°C(77°F)、パルスレート350 kHz、物体反射率80%、および距離120 mおよび300 mの試験条件下で達成可能です。実際の環境は試験環境と異なることがあります。上記の数値はあくまでも参考値です。 |
| 最小有効検知距離 | 10 m |
| レーザーパルス放射周波数 | 100 kHz、推奨飛行高度 < 500 m 350 kHz、推奨飛行高度 < 300 m 1000 kHz、推奨飛行高度 < 100 m 2000 kHz、推奨飛行高度 < 50 m |
| リターン回数 | 4、8、16回(100 kHz、350 kHz) 4回、8回(1000 kHz) 4回数(2000 kHz) |
| クロスサイクル計算 | 7回 |
| スキャンモードおよびFOV | 直線スキャンモード:水平80°、垂直3° 米印形スキャンモード:水平80°、垂直80° 繰り返しなしスキャンモード:水平80°、垂直80° |
| レーザー安全性分類 | クラス1(IEC 60825-1:2014) |
RGBマッピングカメラ
| センサー | 4/3型CMOS |
| レンズ | 焦点距離(35 mm判換算):28 mm FOV:73.3°(対角)、62°(水平)、41.2°(垂直) 絞り:f/2.0–f/11 |
| シャッター | メカニカルシャッター:2–1/1500 秒(f/2.0)、2–1/2000 秒(f/2.8–f/11) シャッター回数:500,000 電子シャッター:2〜1/16000秒 |
| 画像サイズ | 1億画素:12288×8192 25 MP:6144×4096 |
| 写真撮影の最小間隔 | JPEG: 25 MP:0.5秒 1億画素:1秒 RAW または JPEG + RAW: 1.2秒 |
| 映像仕様 | ビデオフォーマット:MP4(MPEG-4 HEVC/H.265) 解像度: 4K:3840×2160@30fps フルHD:1920×1080@30fps |
位置姿勢測定システム (POS)
| GNSS更新レート | 5 Hz |
| POS更新レート | 200 Hz |
| 姿勢エラー | ヨー角:0.02°(後処理、1σ) ピッチ/ロール角:0.01°(後処理後、1σ) |
| 測位精度 | 水平精度:1.0 cm + 1 ppm(RTKがFIX時) 垂直精度:1.5 cm + 1 ppm(RTKがFIX時) |
| 対応PPK差分データ形式 | DAT:D-RTK 3多機能ステーションおよびD-RTK 2によるベースステーションモードで生成 RINEX:v2.1x、v3.0x RTCM: v3.0、v3.1、v3.2、v3.3(プロトコル: MSM3、MSM4、MSM5、MSM6、MSM7) OEM:OEM4、OEM6 現場での運用では、多機能ベースステーションと機体間の距離が15 kmを超えないようにし、多機能ベースステーションが2つ以上のGNSS衛星測位システムに対応していることを確認してください。 ジンバル |
ジンバル
| 自由度 | 3軸(ピッチ、ロール、ヨー) |
| 角度精度 | ±0.01° |
| 機械的可動範囲 | ピッチ:-135° 〜 +73° ロール:-90°~+60° ヨー:-105°~+105° 構造的な限界を意味します。操作可能範囲ではありません。 |
| 操作可能範囲 | ピッチ:-120° 〜 +60° ヨー:-80°~+80° ロールはパイロットによる操作は不可で、ジンバルでの安定化のみに使用されます。 |
| 自己診断方法 | ロール軸:自己診断不要 ヨー軸:リミットストップによるチェック ピッチ軸:自己診断不要 |
| 取り付け方法 | 着脱式DJI SKYPORT(Zenmuse L3 シングルジンバルコネクター) |
データストレージ
| 生データストレージ | 写真/IMU/点群/GNSS/キャリブレーションファイル |
| 標準メモリーカード | CFexpress™ Type Bメモリーカード、連続書き込み速度1500 MB/s |
| 標準カードリーダー | 読取/書込速度 > 900 MB/s |
ソフトウェアエコシステム
| データ収集 | DJI Pilot 2 |
| データ処理 | DJI Terra |
| データ活用 | DJI Modify |
| クラウドアプリケーション | DJI FlightHub 2 |
| データフォーマット | DJI Terraは、以下の形式の点群モデルのエクスポートに対応: 標準点群フォーマット:PNTS/LAS/LAZ/PLY/PCD/S3MB DJI Modifyは、以下の形式の点群モデルのインポートをサポートしています: 標準点群フォーマット:LAS |



